ROS 是一个开源的机器人操作系统,其已经在学术界和工业界广泛应用。其为开发者提供了大量的资源和工具,促进了社区的创新和合作。ROS的模块化设计允许开发者创建可重用的组件,这有助于快速开发和部署机器人应用。ROS 是一个开源的机器人操作系统,其已经在学术界和工业界广泛应用。其为开发者提供了大量的资源和工具,促进了社区的创新和合作。ROS的模块化设计允许开发者创建可重用的组件,这有助于快速开发和部署机器人应用。随着时间的推移,ROS的生态系统不断扩大,类似于Android生态系统的扩展,提供了丰富的库和工具。
ROS 核心概念
- Node(节点):在ROS中,节点是执行特定任务的独立进程,例如传感器驱动程序或提供控制服务的程序。每个节点通常只执行一个特定的功能,但可以与其他节点协同工作以实现复杂的机器人行为。
- Topics(话题):话题是ROS中一种常见的消息传递机制,允许节点之间异步地传递消息。发布者将消息发布到特定的话题,而订阅者则从该话题接收特定的消息。这种机制适用于需要持续数据流的场景,例如传感器数据的传输。
- Message(消息):消息是ROS中节点之间通信时传递的数据类型和结构。ROS提供了大量预定义的常用数据类型,同时也允许用户自定义消息类型和结构,以满足特定需求。
- Service(服务):服务是ROS中的一种同步通信机制,与话题不同,它用于请求-响应模式的任务。一个节点提供服务,其他节点可以请求该服务并接收相应的响应信息。服务适用于需要立即反馈的操作,例如查询或控制指令。
- Action(行为):行为是一种用于执行时间较长操作的通信机制,支持预期的开始、过程中的反馈和最终的结果。与服务类似,行为也是同步的,但更适合于需要持续跟踪和反馈的任务,例如导航和路径规划。
- 参数服务器(Parameter Server):参数服务器是一个分布式的参数存储系统,用于保存ROS中的全局参数和配置信息。节点可以从参数服务器获取参数,也可以将参数写入其中。参数服务器在系统配置和动态调整中起到了重要作用。
ROS 应用框架
- 应用层(Application Layer)
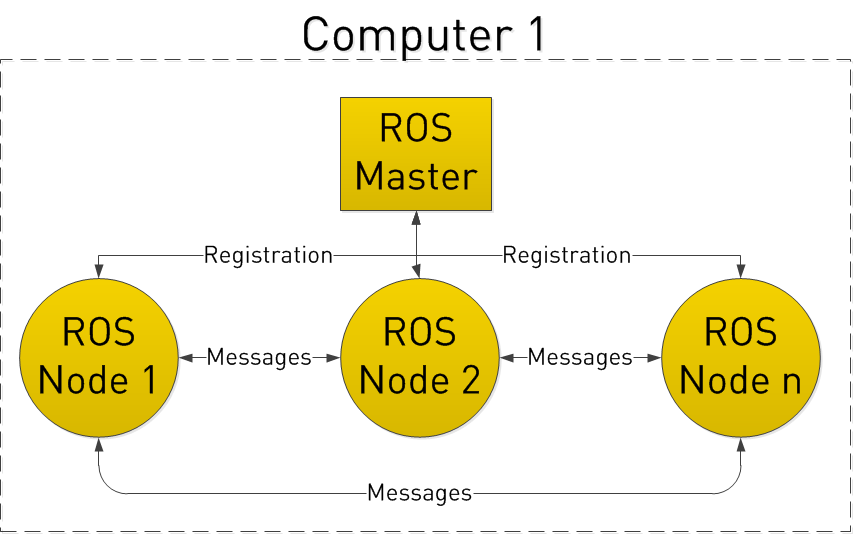
应用层是最上层,它主要包括: - ROS Master:负责节点的注册和节点间的信息查找服务。它是节点间通信的中介者,帮助节点相互发现和建立连接。
- Nodes:节点是 ROS 中的基本执行单元,每个节点可以发布或订阅话题、提供或使用服务,执行特定的任务如传感器数据处理、控制算法等。
- 中间层(Middleware Layer)
中间层提供了多种关键功能,主要包括: - Client Libraries:如
roscpp (C++)、rospy (Python) 等,这些库提供了 API,使开发者可以方便地编写节点代码,管理话题订阅/发布和服务调用。 - Communication Protocols (TCPROS/UDPROS):这些是 ROS 的底层通信协议,用于节点之间的实际数据传输。TCPROS 是基于 TCP 的可靠通信协议,适用于大多数需要可靠传输的应用;UDPROS 是基于 UDP 的,适用于对实时性要求高的应用。
- Nodelet API:Nodelet 允许在同一进程中运行多个节点(nodelets),这样可以避免进程间通信的开销,提高效率。Nodelets 在处理高频率消息和要求低延迟的应用中非常有用。
- 操作系统层(Operating System Layer)
- Linux:ROS 最初主要是在 Linux 系统上开发和运行的,因为 Linux 提供了强大的网络和多线程支持,是实现 ROS 复杂通信模式的理想选择。Linux 的开源性质也符合 ROS 社区的开放和共享精神。
这种分层架构不仅提高了系统的灵活性和可扩展性,而且使得 ROS 可以在不同的操作系统和硬件平台上运行。例如,尽管 ROS 最初是为 Linux 设计的,但通过使用适当的通信库和接口,它也可以在其他操作系统如 macOS、Windows 上运行。此外,ROS 的设计还考虑到了分布式计算,允许在不同机器上运行的节点彼此通信,这对于构建复杂的机器人系统尤为重要。